Control a little car with a morph
Last updated at 5:03 pm UTC on 16 January 2006
The goal of this page is to show a little environment build upon SqLego.
You have to build a little car with two motors, one for each wheel. I do not give any specification (like width between wheels or size of it) because I do not have yet sensor motor, which is necessary for getting something accurate.
With this project I wanted to perform a mapping from a Morph toward a little robot build with LegoMindstorms.
It is very easy to build a little robot with Lego Mindstorms which is able to detect if it is in front of an obstacle, if it is in front of a light source, if it touch anything else... All these characteristics are implicit with morph. This is the basis of why I think a such mapping could be realized easily.
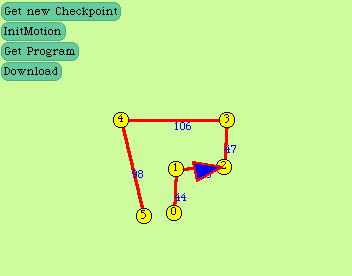
Environment
To open it, doIt on : RCXWorld open
Define a path from the "Get new checkpoint" button, place it on the green field, click on "Init Motion", and click on "Download".
A Program is defined, then transfered to the yellow brick, run press the "run" button and, if you are lucky, the car should describe the path defined.
How it works
The behavior of a morph is defined by a "high-level" language composed of instruction as : turnLeft, turnRight, walk.
This program is then transformed in an intermediare language described in the SqLego page.
Pics gallery
More Control a little car with a morph
ToDo
The system is clearly not accurate at all. All the mesure have to be done for one kind of surface.
Once I will get the "sensor motor", I will try to make a precise implementation
Comments
Add comments here...
Alexandre : bergel@iam.unibe.ch